







-
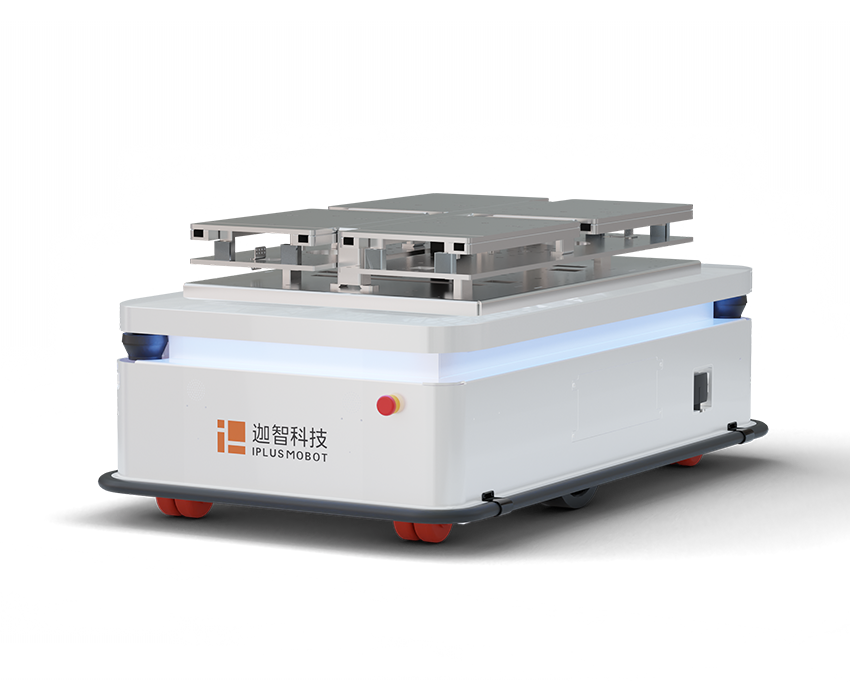
 レーザーSLAM+ビジュアル+IMU誘導方式
レーザーSLAM+ビジュアル+IMU誘導方式 -
 400積載荷重(kg)
400積載荷重(kg) -
 ±2mm/0.2°ドッキング精度
±2mm/0.2°ドッキング精度 -
 60リフト揚程(mm)
60リフト揚程(mm) -
 916旋回直径(mm)
916旋回直径(mm) -
 ≥8稼働時間(H)
≥8稼働時間(H)
| 基本情報 | 自重130KG 寸法(L*W*H) 824*533*253mm 2輪差動駆動 | パフォーマンス | 積載荷重 400kg ドッキング精度 ±2mm/±0.5° 旋回直径 916mm | バッテリー | 充電時間 ≤1.5h 稼働時間 ≥8h |
| 環境要件 | 許容段差 ≤10mm 許容隙間幅 ≤35mm 満載時走行速度 1.2m/s | 停止精度 ±10mm/±1° 登坂能力 5% 空載時走行速度 1.5m/s | 温度 0-40°C 湿度 10%-90% | ||
| 安全装置 | 障害検知センサー 光・音声警報 | 安全バンパー 3Dカメラ(オプション) | 非常スイッチ |














製品特徴
Product advantages
様々なトップモジュールが搭載可能
独自の技術で迅速に対応可能
-
小型でありながら積載が多く400kgの積載量で70cmの狭い通路で稼働可能
-
 大規模なプロジェクトで実証された信頼性多業種に応用で実証された汎用性
大規模なプロジェクトで実証された信頼性多業種に応用で実証された汎用性 -
高精度の原材料搬送±2mm/0.2°のドッキング作業に対応
-
物流情報をリアルタイムで可視化CLOUDIAシステムと組み合わせて運送の全プロセスを制御追跡可能
様々なトップモジュールが搭載可能
独自の技術で迅速に対応可能
小型でありながら積載が多く
400kgの積載量で70cmの狭い通路で稼働可能
大規模なプロジェクトで実証された信頼性
多業種に応用で実証された汎用性
トップモジュール
Vehicle selection
-
 リフト機構
リフト機構 -
 輸送機構
輸送機構 -
 高精度実行機構
高精度実行機構 -
 面積可変機構
面積可変機構
リフト機構
輸送機構
高精度実行機構
面積可変機構
付属品
Peripheral supporting

CLOUDIA

充電ステーション




